Interfacing L298N DC Motor Driver Module with Arduino
Written by
Saeed Olfat
L298N DC Motor Driver Feature
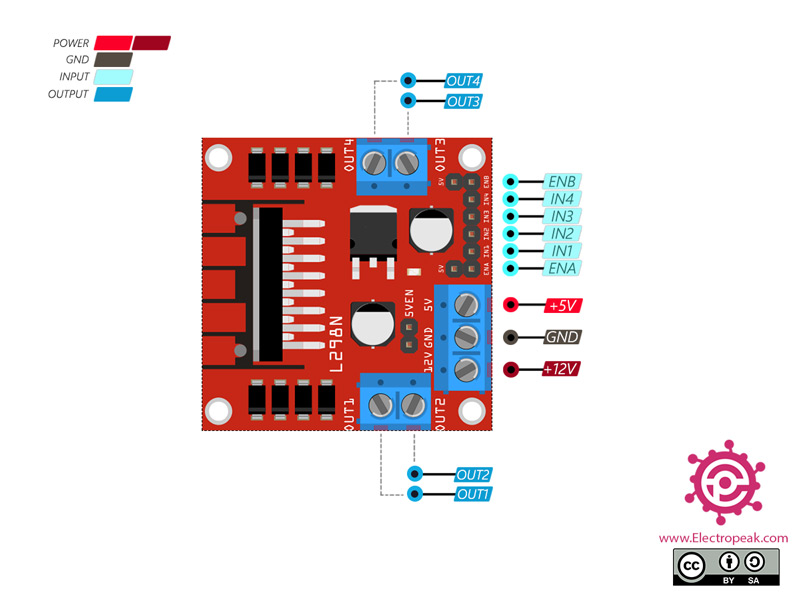
L298N module is used to drive DC motors with a current of less than 2 amps. This module is easy to use. It contains convenient filter circuit and have access to inputs and outputs via pin headers and terminals.
The L298N is a dual full-bridge motor driver that allows two DC motors to be connected simultaneously.
Note
The L298N motor controller follows the H-bridge configuration, so it can be used to drive stepper motors too.
This driver needs a logic voltage supply to drive the motors, which uses a 5-volt regulator to solve the logic voltage supply problem. This module features:
Max operating voltage: 46 V DC
Max output current: 2 A (Peak 3 A)
Power: 25 W
Input voltage level: 5 V
Working temperature: -25 to 130 Celsius
Note
If the motor is overloaded, the driver temperature will rise rapidly, and since the working temperature of the L298N is between -25 and 130 degrees Celsius, you should cool down the heatsink.
You can download the datasheet of this module here.
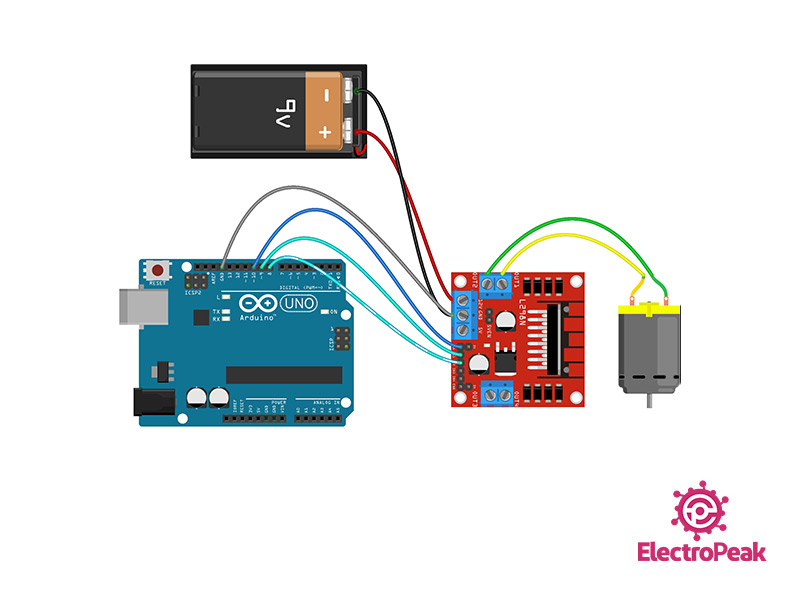
As you can see in the code, the motor first moves forward for 3 seconds and then backward for 3 seconds. Then the motor stops and its speed increases from 0 to 100% in the forward direction with constant acceleration, and then the same is done in reverse direction.
By following these steps, you can successfully interface the L298N DC motor driver module with Arduino, allowing precise control over your motors.