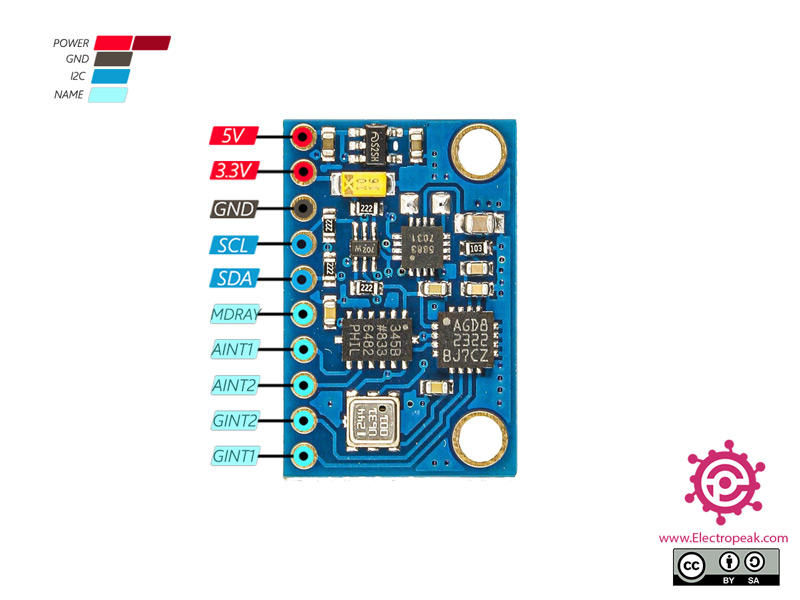
To download the datasheet of GY-801 module, click here.
To download the datasheet of L3G4200D sensor, click here.
To download the datasheet of ADXL345 sensor, click here.
To download the datasheet of MMC5883MC sensor, click here.
To download the datasheet of BMP180 sensor, click here.