
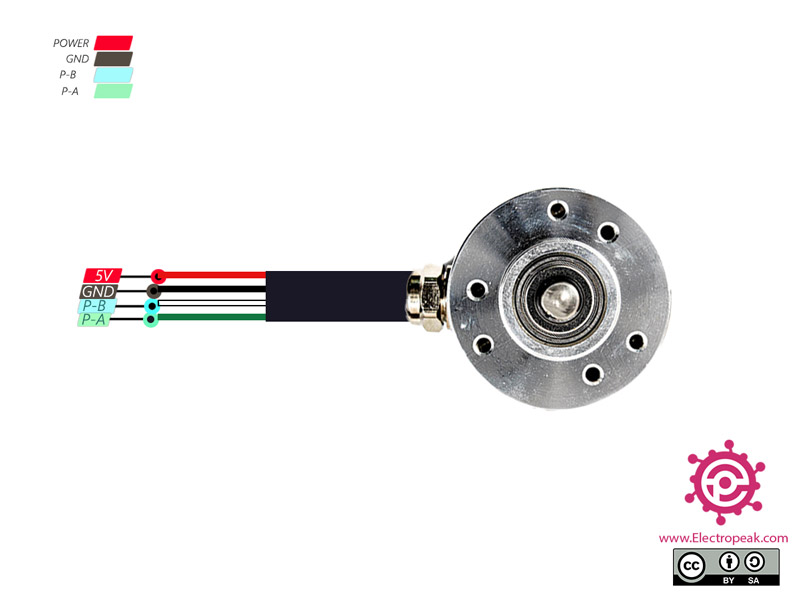
You can download the datasheet of this sensor here.



You can download the datasheet of this sensor here.

Comments (2)
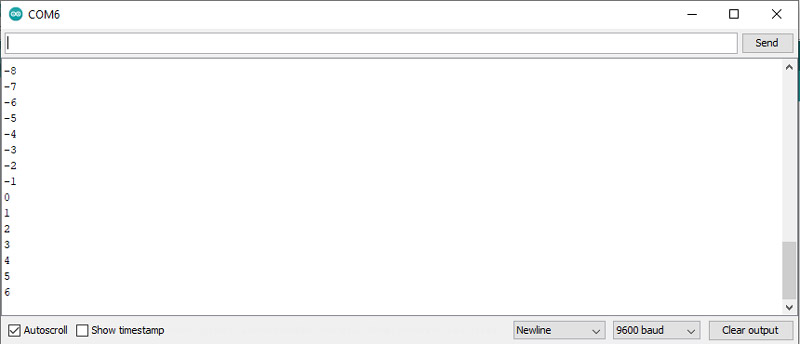
Although the program seems to work, the code is definitely wrong:
– Events should be rising _and_ falling
– Gray code has error transitions, which should be ignored, see https://en.wikipedia.org/wiki/Incremental_encoder
I did like the simplicity of your solution at first. While playing with it I found, that it is very susceptible for errors which add up over time.
Thanks for your explanations. We will try to use them to improve our program.