You can download the datasheet of this module here.


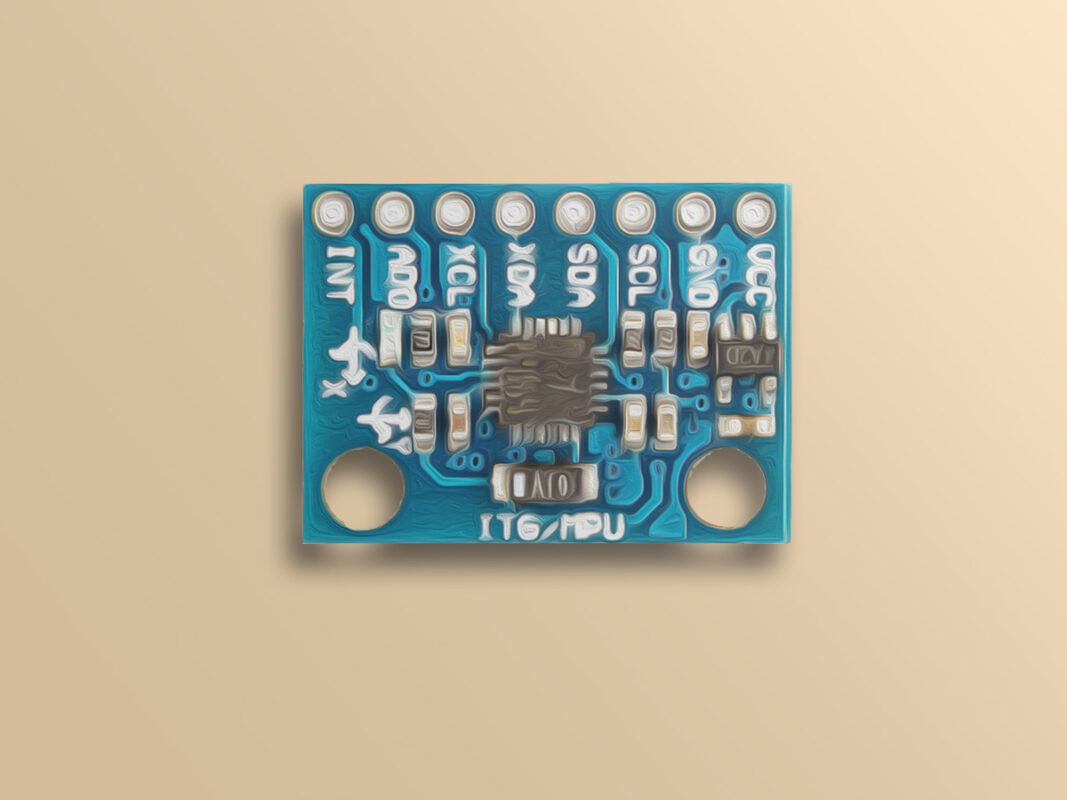
You can download the datasheet of this module here.

Comments (2)
Hey, what unit does it calculate acceleration in? m/s^2 or G’s.
Hi Amal,
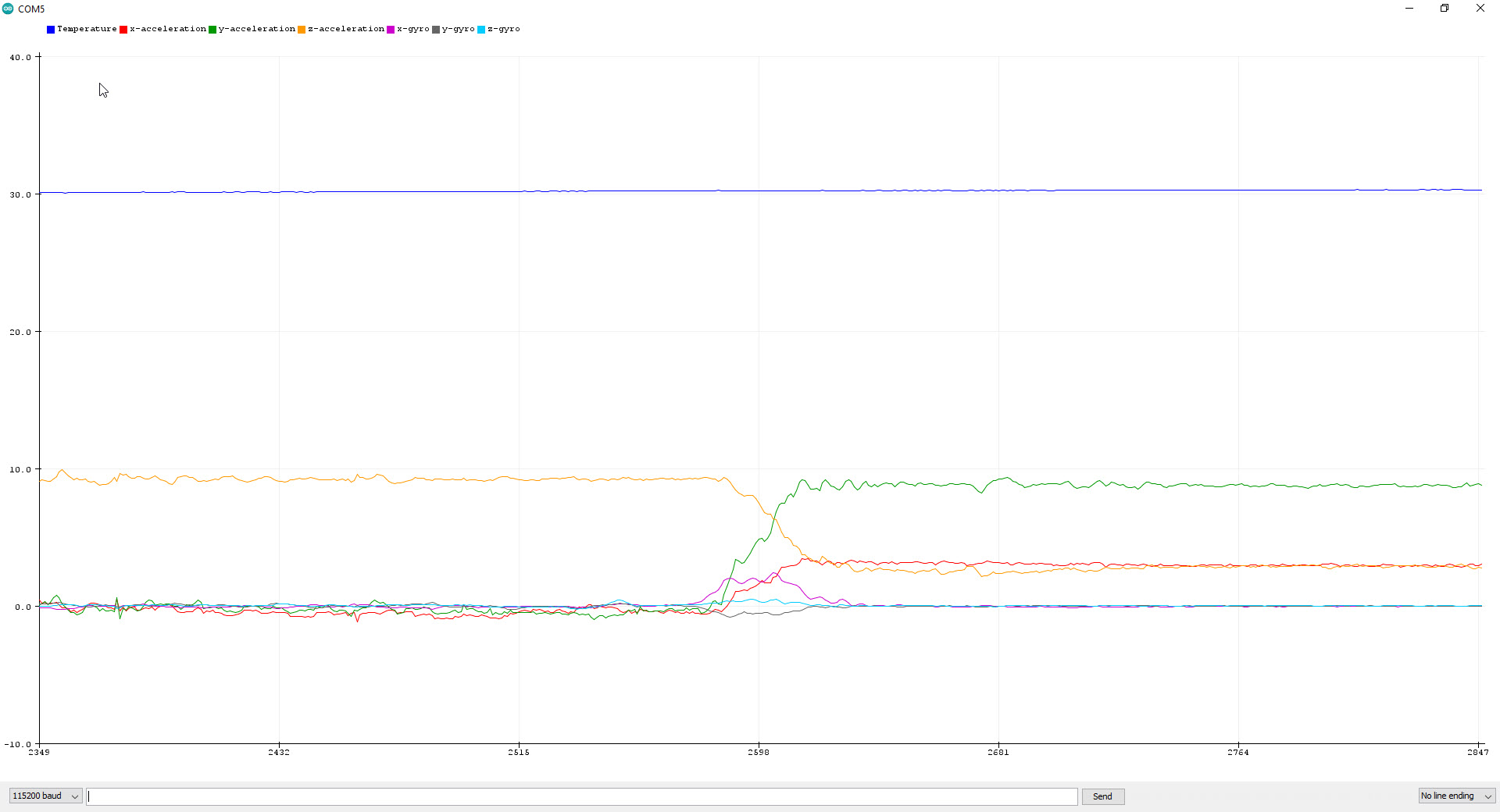
Accelerometer sensors have the ability to adjust the measurement range. For example, you can choose a number from 2g to 16g.
On the other hand, your output is of binary number type. For example, if your sensor is 12-bit, and you set the range to +-2g, it will output 4096 at acceleration 2g. You have to multiply this number by the factor called “sensitivity” in the datasheet to get the acceleration value.
In some accurate and expensive accelerometers such as ADIS16488, the measurement range is fixed, and by multiplying the sensitivity by the output number, the acceleration in g units is obtained.