Product added to cart

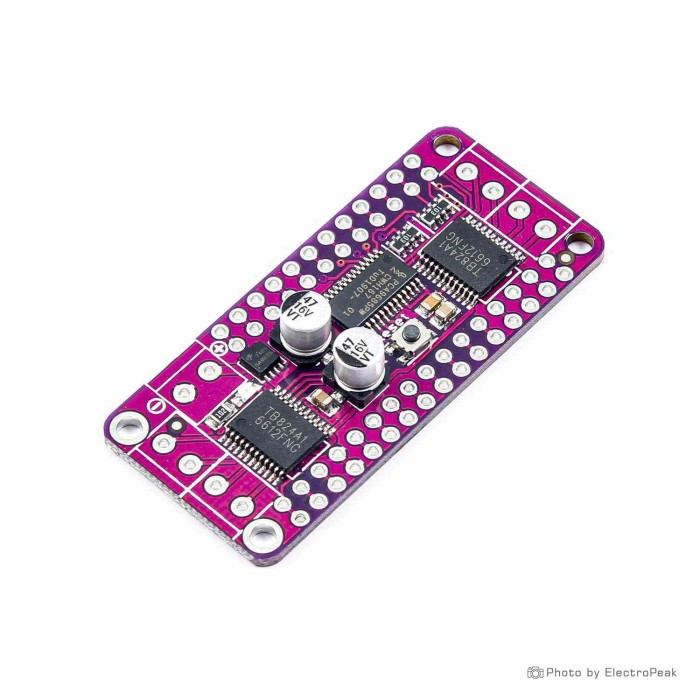
CJMCU TB6612 DC/Stepper Motor Driver
$16.2500
In stock
SKU
MTR-09-011
Volume discounts:
- +25 4 % $15.6400
- +50 6 % $15.3300
- +100 8 % $15.0300
- +300 9 % $14.7200
- +500 11 % $14.4200
Ships in 2-3 business days, then:
Free delivery in10-15 days by YunExpress on orders over $35.
Free delivery in5-7 days by DHL on orders over $200.
More shipping info

Shop with confidence Learn More
 TMC2100 Stepper Motor Driver Previous
TMC2100 Stepper Motor Driver Previous 
Description
TB6612 Four Channel H Bridge DC And Stepper Motor Driver Module is a 4 channel, stepper motor driver and controller board for Arduino, which is based on two TB6612 IC and another chip, known as PCA9685. The TB6612 chip is a driver IC for DC and stepper motor with output transistor in LD MOS structure with low ON-resistor. The first input signals, IN1 and second input signals, IN2, can select one of these four modes: CW, CCW, short break, and stop mode. The TB6612 produces 1.2A per bridge (3A peak) with thermal shutdown protection, internal kickback protection diodes and can drive motors on 4.5VDC to 13.5VDC. This 4 channel driver can drive and control two bi-polar stepper motors or fore brushed DC motor, or one stepper and two DC motors.
Also the PCA9685 chip is a fully-dedicated PWM driver chip, and a good replacement of using a latch and the PWM pins which handles all the motor and speed controls over I2C. By using I2C (SDA & SCL pins), it works with any and all Feathers- ATmega32u4, ATSAM M0 or ESP8266-based. It can be stacked with any other FeatherWing or with itself (each wing with a unique I2C address). By applying an appreciate feather stacking headers or feather female headers, user can connect it to a FeatherWing and make a flight gadget.
Features
Full H-Bridges: 1.2A per bridge (3A peak)
Can run motors on 4.5VDC to 13.5VDC.
Up to 4 bi-directional DC motors with individual 12-bit speed selection (so, about 0.02% resolution)
Up to 2 stepper motors (unipolar or bipolar) with single coil, double coil, interleaved or micro-stepping.
Motors automatically disabled on power-up
Big 3.5mm terminal block connectors to easily hook up wires (18-26AWG) and power
Polarity protected 2-pin terminal block and jumper to connect external power, for separate logic/motor supplies.
Size: 55mm x 25mm
Write Your Own Review

Please complete your information below to login.
Sign In
Create New Account