Interfacing ULN2003 Stepper Motor Driver with Arduino
Written by
Amir Mohammad Shojaei
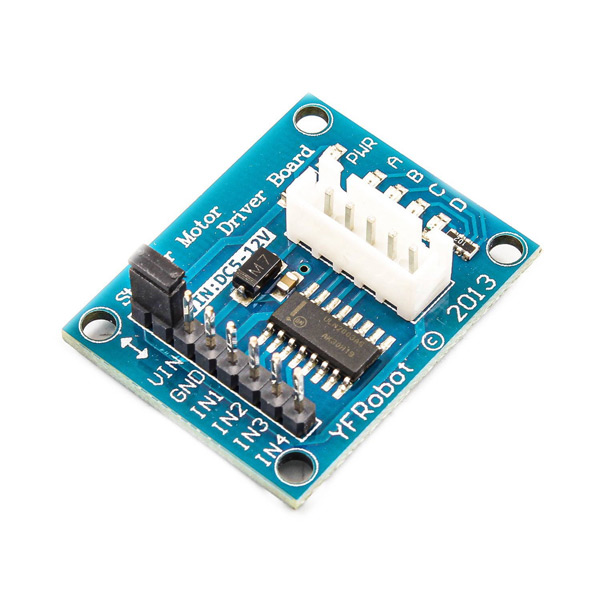
ULN2003 Stepper Motor Driver Features
We usually use stepper motors when we need precise control of the motor shaft. These motors can be used in robot arm, 3D printers, CNC machines, etc. 28BJY-48 is a kind of stepper motor. In full step mode, these motors have a 1 to 64 speed reduction gearbox and eachfull 360 degree rotation consists of 32 steps. The ULN2003 driver is commonly used to control these motors.
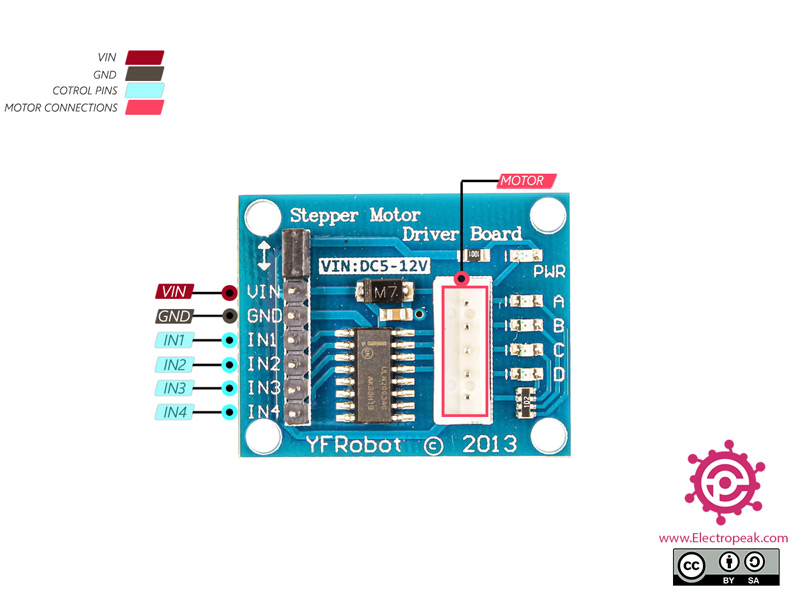
ULN2003 IC consists of 7 pairs of Darlington transistors, each pair can withstand 500mA and 50V. There are 4 transistors in this module. This module has 4 LEDs to show the activity of 4 motor control pins.
You can download the datasheet of ULN2003 IC here.
based on Arduino library Example
*/
#include <Stepper.h>
const int stepsPerRevolution = 2048;
const int rpm = 12;
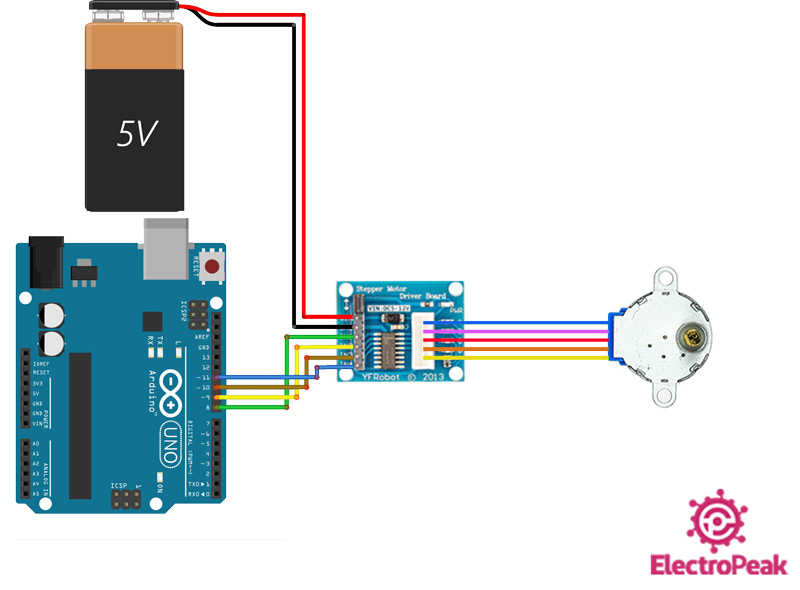
Stepper stepper1 = Stepper(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
stepper1.setSpeed(rpm);
}
void loop() {
stepper1.step(stepsPerRevolution);
delay(100);
stepper1.step(-stepsPerRevolution);
delay(100);
}
In the above code, at first the motor library is included. In the next step, the two variables of rotation step and motor speed are determined in terms of RPM. The 28BJY-48 motor has a 64:1 gear and 32 steps per revolution. To obtain the final number of steps, the gear ratio must be multiplied by the number of steps per revolution (32×64 = 2048). We also set its speed to 12 RPM. The control pins are then determined in the above order. Finally, the motor rotates clockwise for 5 seconds and counterclockwise for 5 seconds.



Comments (4)
Which pins in this line ” Stepper stepper1 = Stepper(stepsPerRevolution, 8, 10, 9, 11); ” must be used when it is an Arduino NANO?
Hi,
There is no significant difference between Arduino UNO and NANO. So, you can use the same pins for it.
can I use this controller to control a stepper motor no 17. If I can, which pins of the motor do I connect to which pins of the controller?
Thank you
Hello, my friend,
you can’t connect NEMA 17 to this driver.
You can use the A4988 driver