/*GY-25 test Code
*2023-01-11 electropeak by Ali Akbar Hosseini
* using software serial for communating with Arduino Uno
* if using Mega or any thing with more than One Serial channel use hardwareSerial
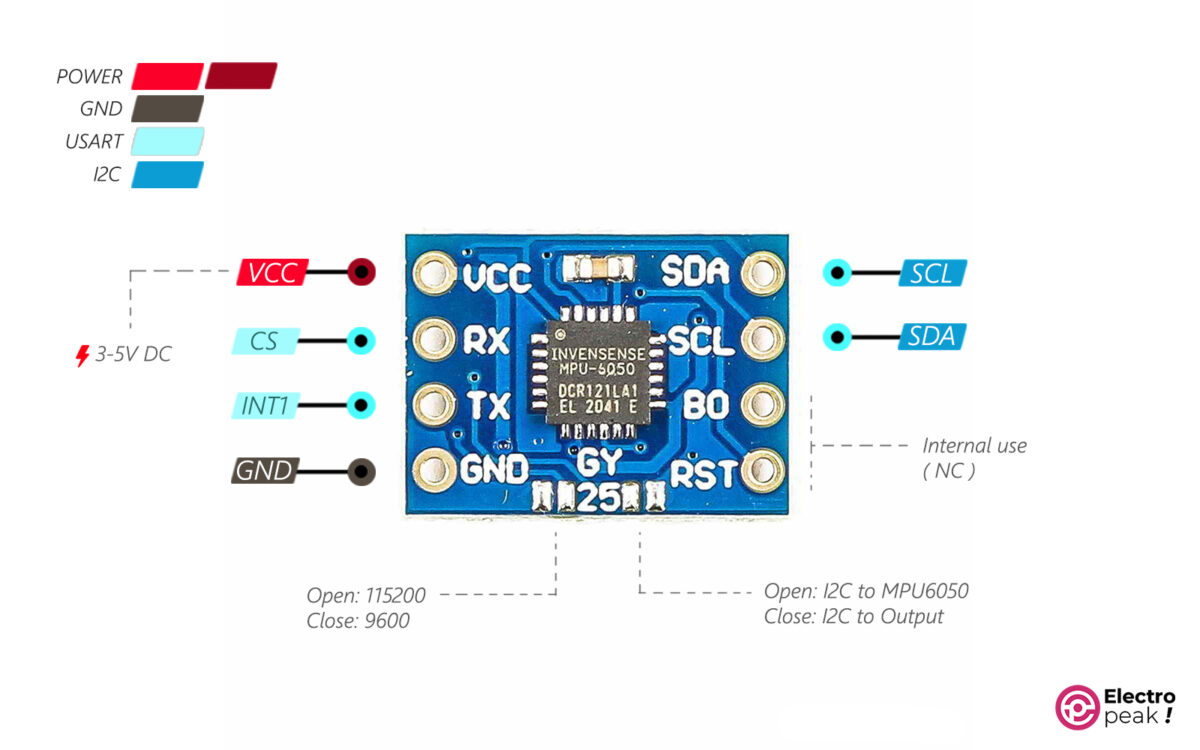
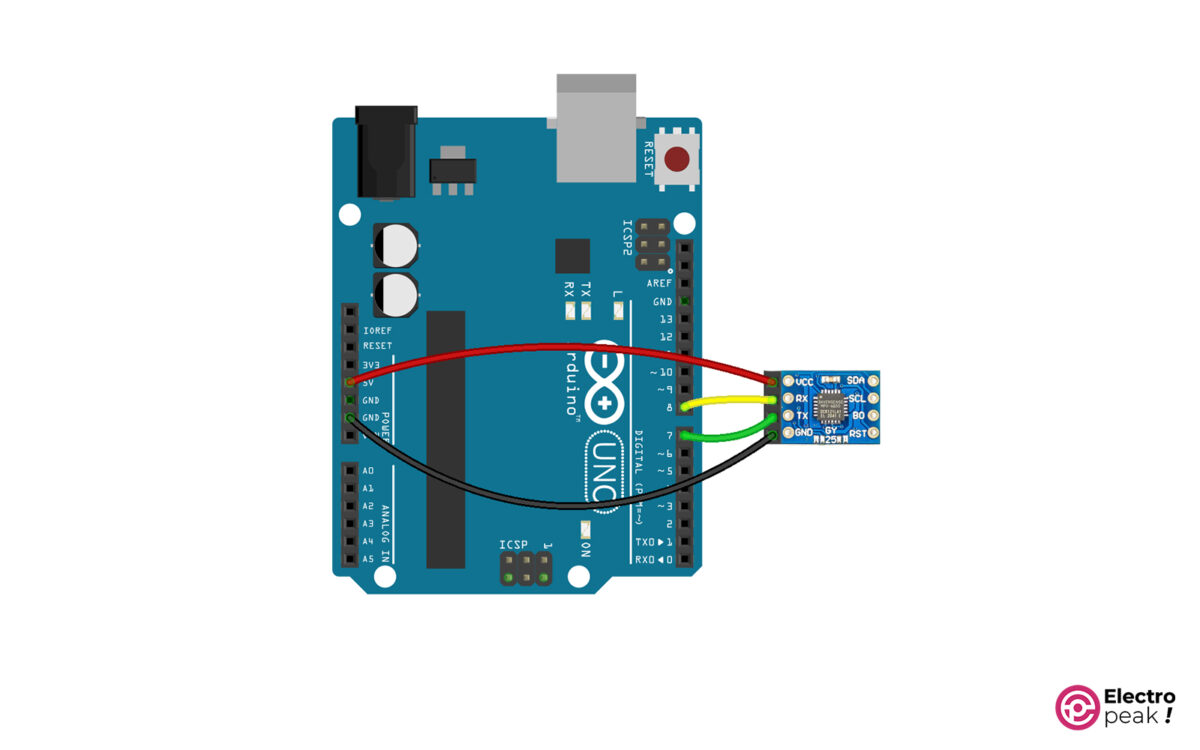
* connect sensor TX to arduino RX(in this code pin #8)
* connect sensor RX to arduino TX(in this code pin #7)
*/
#include <SoftwareSerial.h> // software Serial, to use another pins as TX, RX
static const int RXPin = 7, TXPin = 8; // announce your Rx and Tx pins
SoftwareSerial newserial(RXPin, TXPin);
float Roll,Pitch,Yaw;
unsigned char Re_buf[8],counter=0;
void setup()
{
Serial.begin(9600);
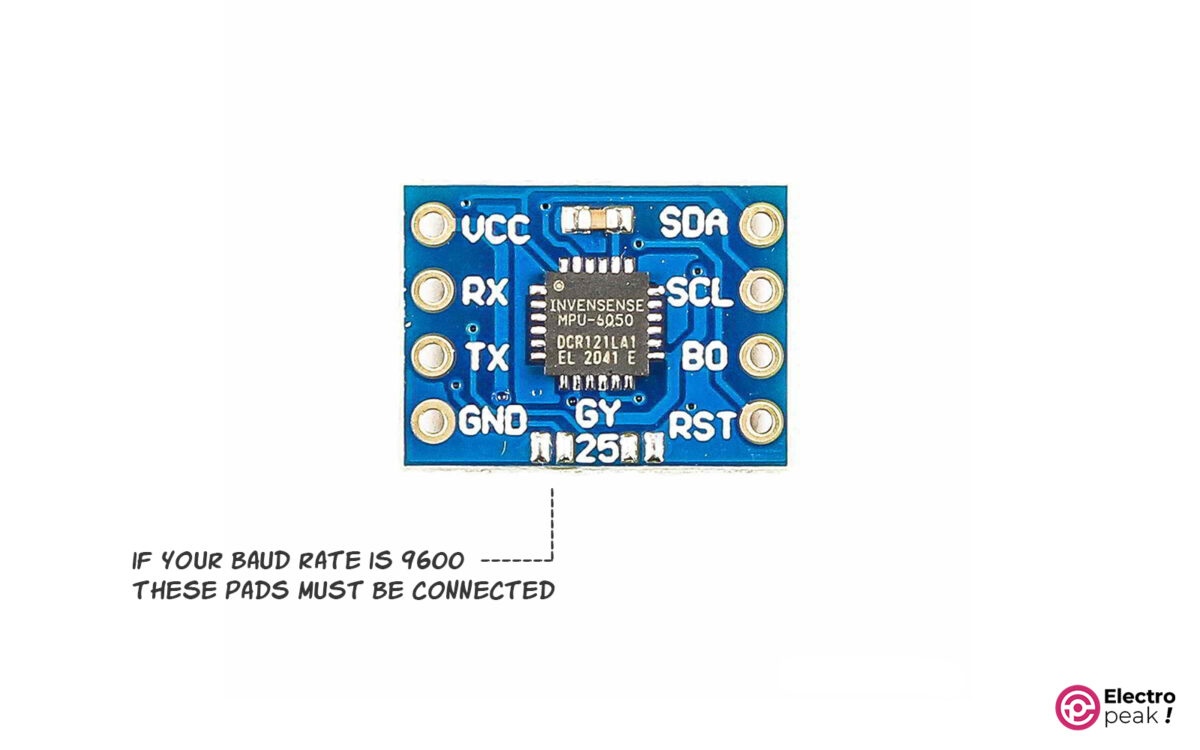
newserial.begin(115200); // SoftwareSerial can only support 9600 baud rate for GY-25 but Serial3 can support 115200 and 9600 both
delay(4000);
newserial.write(0XA5);
newserial.write(0X54);//correction mode
delay(4000);
newserial.write(0XA5);
newserial.write(0X51);//0X51:query mode, return directly to the angle value, to be sent each read, 0X52:Automatic mode,send a direct return angle, only initialization
}
//looooooooooooooooooop
void loop() {
if (newserial.available()) {
serialEvent();
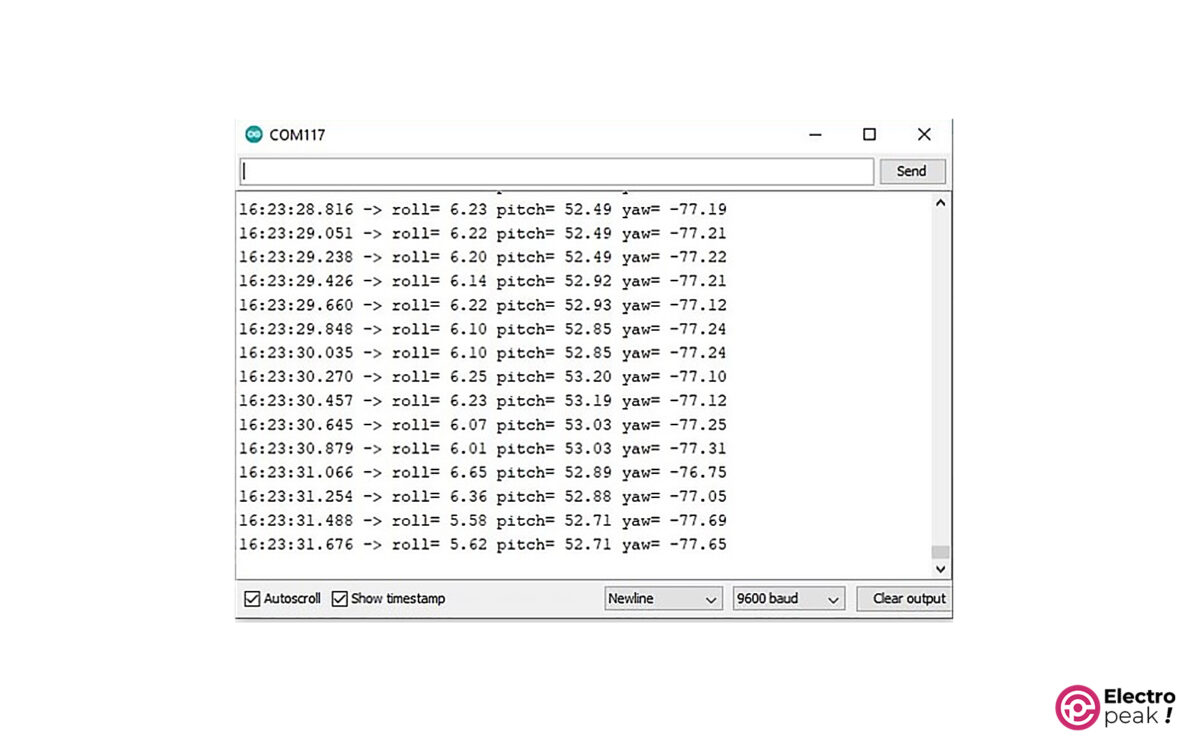
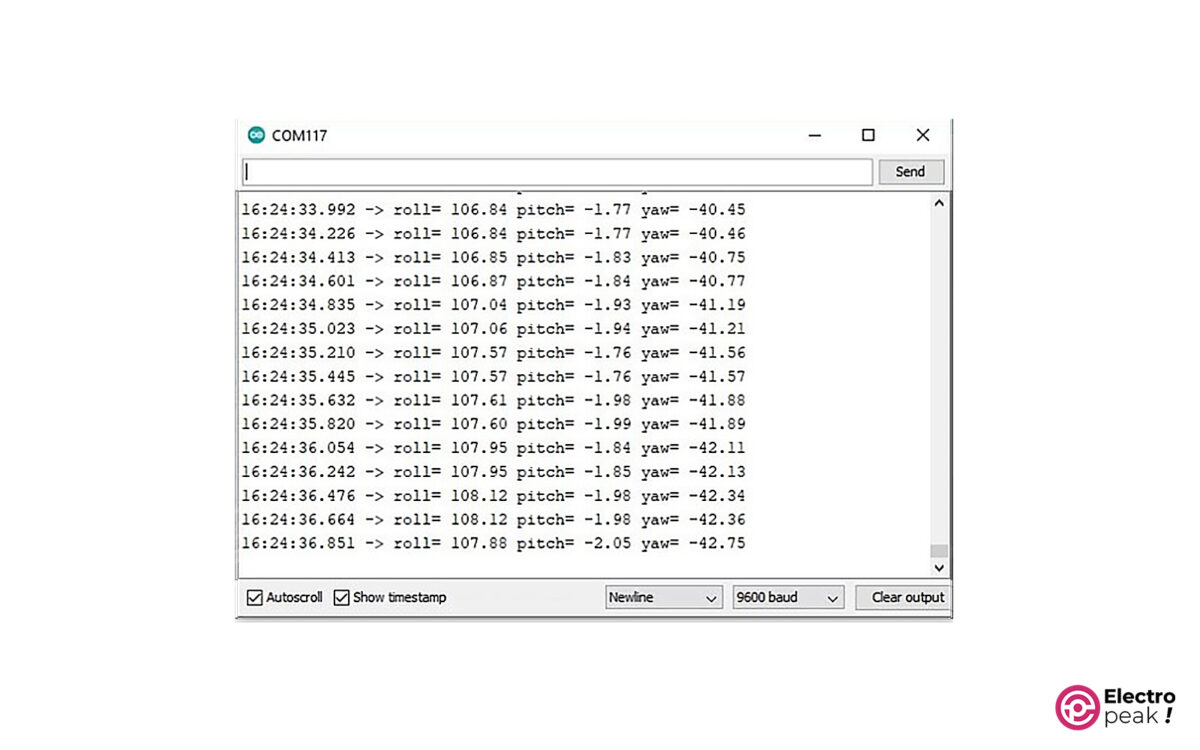
Serial.print("roll= ");
Serial.print(Roll);
Serial.print(" pitch= ");
Serial.print(Pitch);
Serial.print(" yaw= ");
Serial.println(Yaw);
}
else Serial.println("check connections");
delay(200);
}
//loooooooooooooooooooop END
//data reading function
void serialEvent() {
newserial.write(0XA5);
newserial.write(0X51);//send it for each read
while (newserial.available()) {
Re_buf[counter]=(unsigned char)newserial.read();
if(counter==0&&Re_buf[0]!=0xAA) return;
counter++;
if(counter==8) { // package is complete
counter=0;
if(Re_buf[0]==0xAA && Re_buf[7]==0x55) { // data package is correct
Yaw=(int16_t)(Re_buf[1]<<8|Re_buf[2])/100.00;
Pitch=(int16_t)(Re_buf[3]<<8|Re_buf[4])/100.00;
Roll=(int16_t)(Re_buf[5]<<8|Re_buf[6])/100.00;
}
}
}
}