You can download the datasheet of this module here.

You can download the datasheet of this module here.

Comments (2)
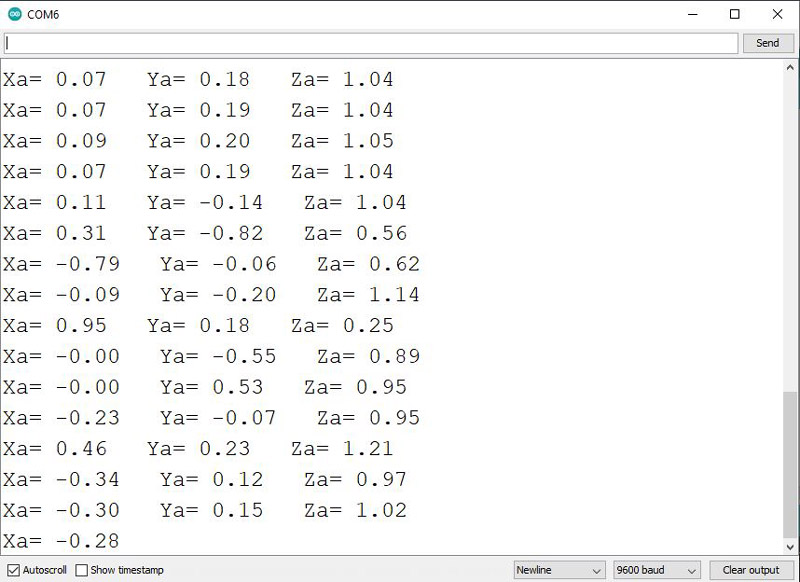
i’m having issues when i try to read data from two adxl345 sensors using esp32 wroom 32d module, also I’ve connected the sdo pin od one of the adxl345 to vcc to change the default i2c address to avoid i2c address conflict, what I’m trying to achieve is to detect tilt angle using tow adxl345 sensors, the formula I’m using is :
float tiltAngle1 = atan2(y1, z1) * 180.0 / PI;
float tiltAngle2 = atan2(y2, z2) * 180.0 / PI;
please help me with this
Hi Tennis,
There is no need to use a sensor to measure rotation in one direction.
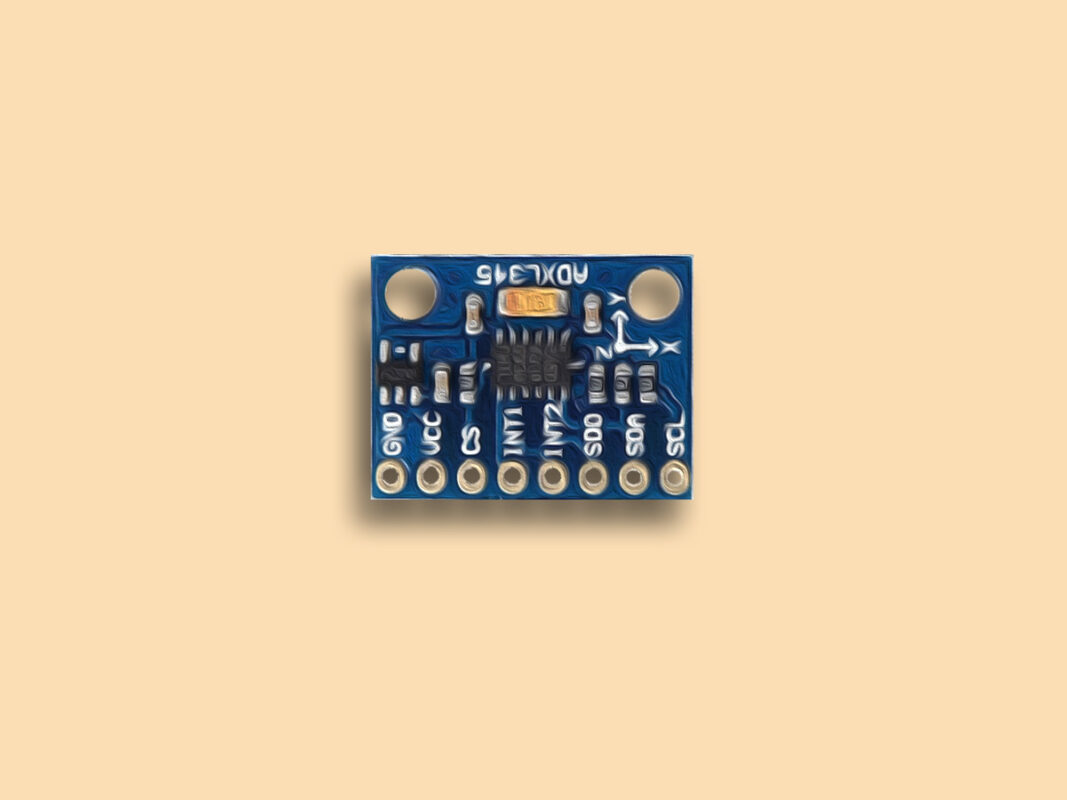
With each of these sensors, you can calculate the rotation along the X and Y axes. ( If you want yaw rotation angle, you must use magnetometers.)
You can use the tutorial in this link.
Also, there are modules like this one that can measure and record angles without any additional work.
If you want to decrease noise of accelerometer, you need to use gyroscope and sensor fusion algorithm like kalman filter.
For this, you can use this library for arduino.