You can download the datasheet of A3967 IC here.

You can download the datasheet of A3967 IC here.

Comments (2)
Hi
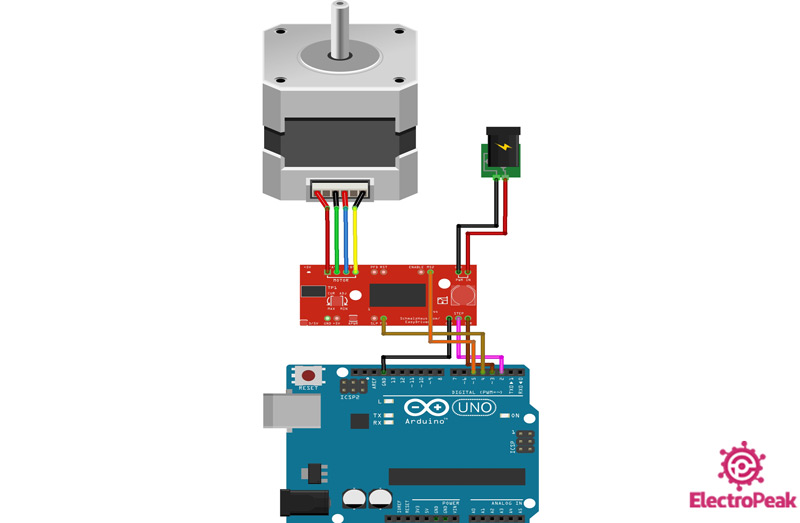
Thanks for explaining the use of the easy driver along with the stepper motor.
Could you advise the code i would need to control the motor and turn it a set number of steps with say a push button. I’m very new to this and I’m finding it difficult to find the code that will allow me to control the motor so the shaft of the motor finishes at a given postion at the push of a button. I need to be able to add 3 buttons and at each push send the shat to a differnt position.
Thanks in advance
Hi dear
it is so easy, you can use below function in your Loop() :
if(key1 == 1 && key1_bounce > Millisecond())
{
digitalWrite(dir, HIGH);
for(x= 0; x<1000; x++)
{
digitalWrite(stp,HIGH);
delay(1);
digitalWrite(stp,LOW);
delay(1);
}
key1 = 0;
}
else if(key2 == 1 && key2_bounce > Millisecond())
{
digitalWrite(dir, LOW);
for(x= 0; x<1000; x++)
{
digitalWrite(stp,HIGH);
delay(1);
digitalWrite(stp,LOW);
delay(1);
}
key2 = 0;
}