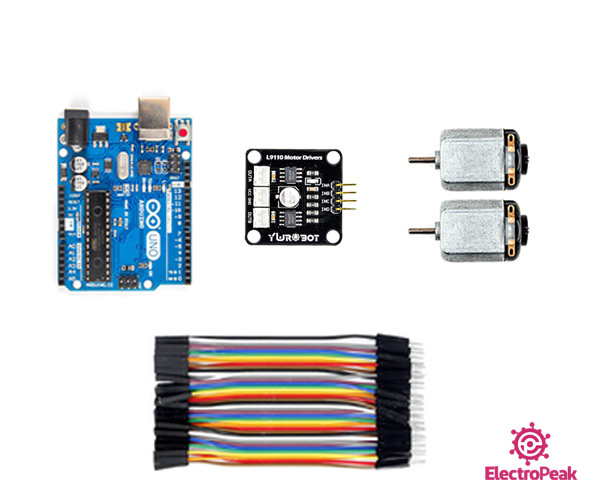
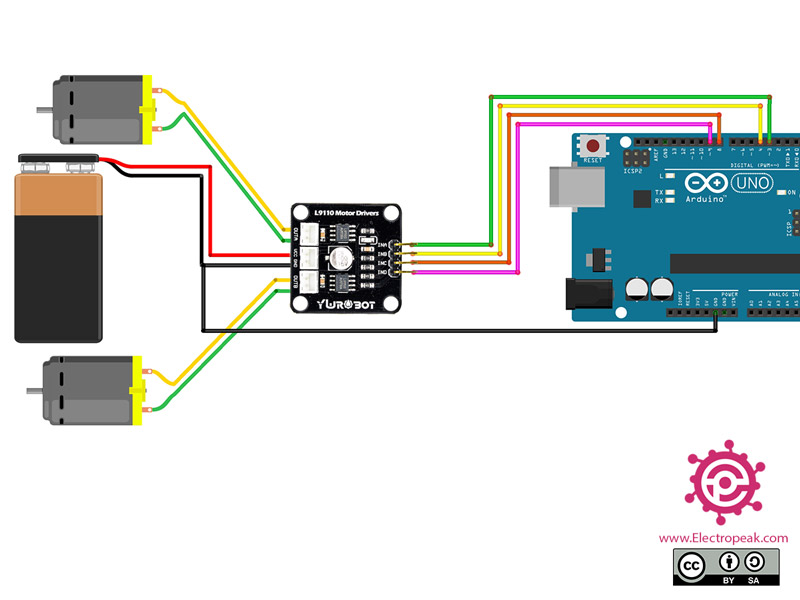
Interfacing YwRobot L9110 Dual Channel Motor Driver Module with Arduino
Written by
Amir Mohammad Shojaei
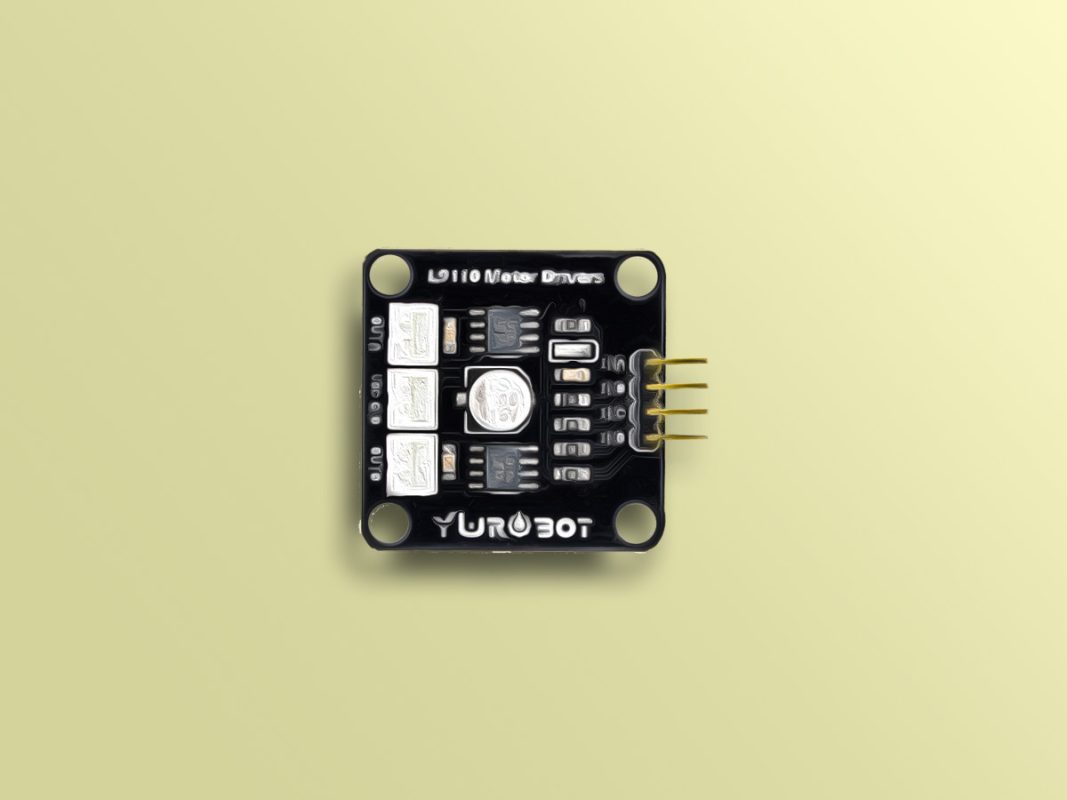
L9110 Dual Channel Driver Module Features
Motor driver modules are very common nowadays and widely used to control the speed and direction of motors. The L9110S dual channel module is one of them. This module can control two DC motors and one stepper motor. It is based on L9110 IC. The key features are:
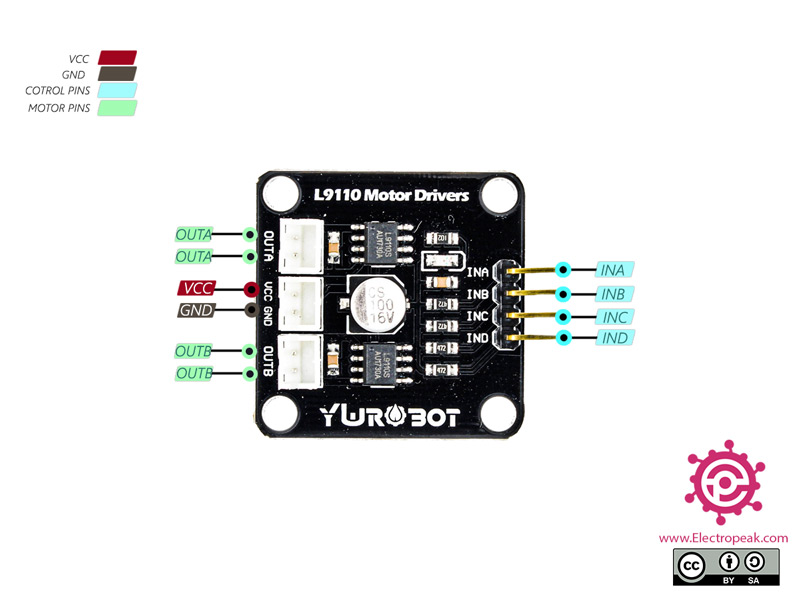
The allowable continuous current for each channel: 800mA.
The operating voltage: 2.5 – 12V.
Two control pins for each DC motor.
Suitablefor toy cars motors.
Can control onestepper motor.
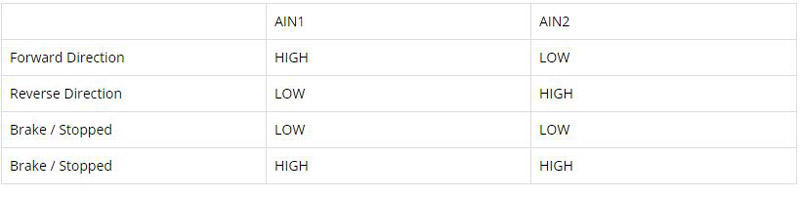
Note
This module can only be used to control the direction of motors rotation.